Introduction
- multi-view images + 2D CNN
2D CNN对多视角图像进行学习和信息综合,恢复3D shape
缺点:拍摄自遮挡,3D信息损失 - volumetric data + 3D CNN
CAD model进行3D Grid的划分
缺点:grid划分太粗,形状信息损失;划分太精细,复杂度非常高 - mesh data(网格数据) + DL(GNN)? ——刚起步的阶段,需要探究
- 深度图 + CNN
- point cloud + DL(GNN & CNN)?
point cloud
raw sensor data 直接可以得到 (激光雷达)
simple representation(N*(x, y, z, color, normal))
better 3D shape capturing
应用领域:自动驾驶、AR&VR、机器人、遥感图像、3D人脸&医学、3D游戏动画的形状设计、e.g.
目前需要思考的问题:
如何更有效、更快速地处理点云?
不规则点云怎么做深度学习/神经网络(进行研究)
datasets:
简单的model:
- Princeton ModelNet: 1k个点
- ShapeNet Part: 2k个点
- PartNet models: (CVPR 2019)(数据集刚提出来,考虑精度提高)
层次化语义分割标注,coarse -> fine-grained
面向使用的复杂的model:
- Stanford 3D indoor scene: 8k个点
- Semantic 3D: 4 billion in total
- ScanNet(室内场景): seg + det检测
- 自动驾驶类:KITTI, nuScenes: det检测
挑战和难点:
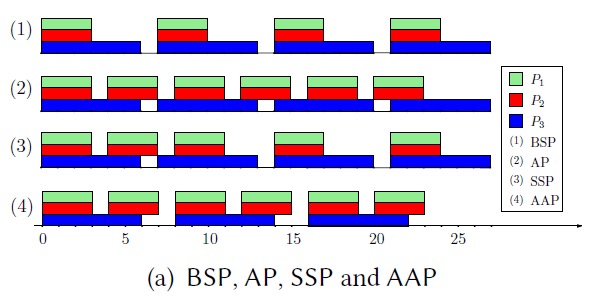
- 不规则,无序。输入顺序不同,卷积结果会发生变化。需要建立置换排列不变性
- 刚性变换的鲁棒性(robustness to rigid transformations):naive的toy点云
- 对于点云的corruption, outlier noise的鲁棒性; partial data局部数据;large-scale data保持高效
Brief review
pointnet家族
共享多层感知机(Shared MLP) + max pool(内部数据发生置换,结果不会发生改变)
逐级映射到高层表示
刚体变换(包括平移、旋转、反转): 增加T-net(transform net), 将输入的三维点云进行变形,得到规范的数据,能够映射到高维
卷积神经网络:由局部到全局的学习范式
PointNet++ 捕捉局部模式
显式地模仿CNN
输入点云采样一些点,以这些点作为中心,寻找局部邻域
规整化处理
- 分成3D grid,对每个grid做PointNet + 3D CNN(VoxelNet, CVPR 2018)
- lattice映射到晶格网络+bilateral convolution双边卷积+hash index
(SPLATNet, CVPR 2018) - 原始点云映射到体积空间,没有任何离散或者近似(PCNN, SIGGRAPH 2018)
- 直接学习,卡方矩阵学习变换(PointCNN, NIPS 2018)
加权和置换,simultaneously weight and permute the input features - 方向编码+尺度敏感(PointSIFT, CVPR 2018)
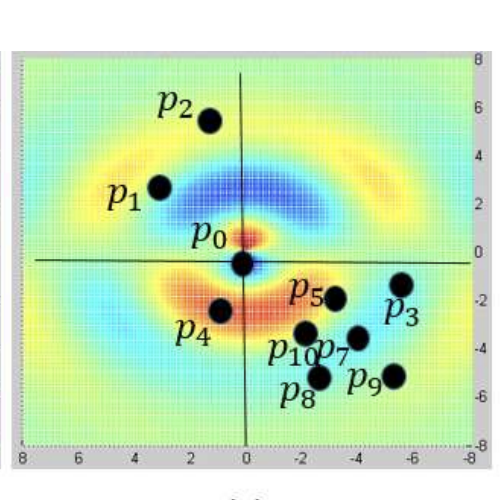
对每一个领域,找邻居点,建立坐标系八个象限,进行方向卷积(orientation-encoding)
参考深度学习的思想,concat多层特征,端到端找到最合适的尺度(scale-aware) - (Self-Organizing Map)自组织映射+MLP( SO-Net, CVPR 2018)
在空间里用Self-organizing点,拟合了geometry structure,学习后能够capture到映射,用了Kd-Tree - Pointwise CNN(CVPR 2018)
简单暴力,直接用3x3的网格,求和+归一化,当作一个特征去卷积 - (一篇比较早的文章,影响比较大,比较独树一帜) Kd-Net, ICCV 2017
用Kd-Tree对原始点云做划分,通过变换的学习到达根节点。将数据结构用到点云分割里。 - FCPN, ECCV 2018
模仿2D空间的FCN,用3D grid, 用pointnet学习每个grid的low-level特征,再用3D CNN做分割
可以一次性处理200k个点
graph-based modeling
- DGCNN, TOG 2019
提出边缘卷积EdgeConv,不卷积点,卷积点与点之间的边
用邻居点和特征差进行权重学习,得到卷积结果 - Regularized GCNN. MM 2018
图卷积 用拉普拉斯矩阵 正则化,
kNN思想 - GAN for Point Cloud. ICLR 2019
用point cloud的格式做gan
需要学习图结构 - Spectral Graph Convolution. ECCV 2018
在谱域进行学习
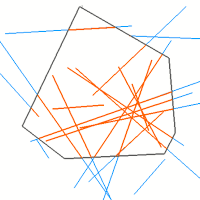
spectral graph conv谱聚类 + recursive spectral cluster pooling - Superpoint Graph, CVPR 2018
minimal partition(最优化的解决方案) + GCN(边缘条件卷积)
用邻边建立superpoint graph
作者在CVPR 2019提出了Oversegmentation做superpoint graph - Deep GCNs. ICCV 2019
探究能不能把graph的网络做深
残差结构、膨胀卷积是否有用
convolution kernel 卷积有效性
- KC-Net. CVPR 2018
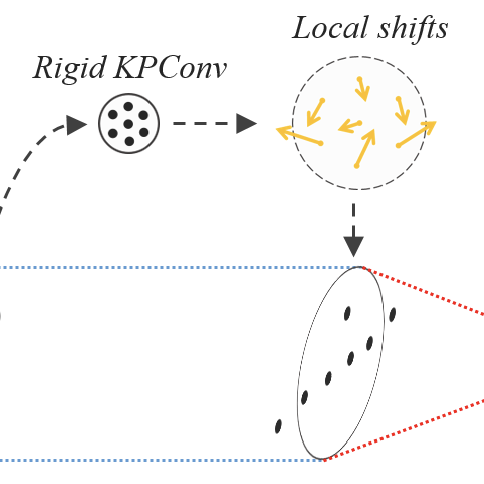
用点云配准的学习思想增加kernel correlation(核相关) - KPConv. arXiv 2019
用了一个带权重的点集kernel points类比2D kernel,输入点云和kernel points里面的每一个点的权重矩阵相乘,然后通过一个相关系数加权求和。 - MCCNN. TOG 2018
蒙特卡洛卷积。使用蒙特卡洛公式离散化(引进密度) - PointConv. CVPR 2019
- Geo-CNN. CVPR 2019
引入角度,更好地学习局部几何